ربات ها به عنوان ابزارهای هوشمند و خودکار، در دهه های اخیر به یک بخش حیاتی از فناوری و صنعت تبدیل شده اند. این تکنولوژی به انسان ها امکان می دهند که به وسیله ربات ها واحد های پیشرفته تر و با توانایی های بیشتری را در زندگی روزمره و در انجام وظایف مختلف مورد استفاده قرار دهند. در این مطلب، به بررسی اجزای اصلی ربات ها خواهیم پرداخت و نقش هر یک از این اجزا در عملکرد و کارکرد این دستگاه های هوشمند را بررسی خواهیم کرد.
از حسگرها و مغز مصنوعی گرفته تا ساختار مکانیکی و اجزاء انرژی، هر یک از این اجزا به عنوان پایه های تشکیل دهنده یک ربات کامل و عملی اهمیت دارند. با هم همراه شویم تا در دنیای پیشرفته رباتیک، اعضای کلیدی این دستگاه های هوشمند را به چشم انداز بیاوریم و نحوه کارکرد هرکدام را بررسی کنیم.

سیستم کنترل در رباتیک
سیستم کنترل در رباتیک، بخش مهمی از ساختار و عملکرد ربات ها است که برای کنترل حرکت، عملکرد، و اجرای وظایف مختلف ربات استفاده می شود. این سیستم به صورت کامپیوتری عمل می کند و اطلاعات از سنسورها را دریافت کرده، آن ها را پردازش می کند و به اعضای مکانیکی ربات دستورات مناسبی ارسال می کند. در کل، سیستم کنترل در رباتیک شامل موارد زیر می شود:
سنسورها:
سنسورها در سیستم کنترل وظیفه اندازه گیری و دریافت اطلاعات از محیط را بر عهده دارند. این سنسورها ممکن است شامل دوربین ها، سنسورهای الکترونیکی، گیرنده های GPS، شتاب سنج ها و سایر حسگرها باشند.
مغز مصنوعی (کنترل کننده مرکزی): مغز مصنوعی یا کنترل کننده مرکزی به عنوان قسمت مهمی از سیستم کنترل عمل می کند. این بخش با پردازش اطلاعات دریافتی از سنسورها و اعمال الگوریتم های هوش مصنوعی تصمیمات لازم را برای حرکت و انجام وظایف ربات اتخاذ می کند.
اعضای مکانیکی:
این بخش شامل اجزای مکانیکی ربات می شود که اجزایی مانند موتورها، چرخ ها یا پاها برای حرکت، دستگاه های گرفتن اشیاء و سایر اجزا برای انجام وظایف مکانیکی را شامل می شود.
کنترل حرکت:
این قسمت از سیستم کنترل مسئول کنترل و هدایت حرکات ربات است. با توجه به اطلاعات دریافتی از مغز مصنوعی، این بخش تصمیمات لازم برای حرکت ها و جابجایی را اتخاذ می کند.
واسط های کاربری:
بعضی از ربات ها دارای واسط های کاربری برای ارتباط با انسان ها هستند. این واسط ها ممکن است شامل صفحه نمایش، گوشی، یا دستگاه های دیگر باشند که امکان ارتباط و تعامل با انسان ها و محیط اطراف را فراهم می کنند.
سیستم کنترل در رباتیک به عنوان مهمترین بخش در اجرای وظایف مختلف ربات ها اهمیت دارد و بر اساس نیازهای وظایف خاص هر ربات، این سیستم طراحی و پیکربندی می شود.
حسگر ها در رباتیک

در رباتیک، حسگرها (سنسورها) اجزای حیاتی هستند که به ربات امکان اندازه گیری و تشخیص وضعیت محیط و اطلاعات مختلف را فراهم می کنند. این حسگرها برای جمع آوری داده های محیطی و اطلاعاتی که لازم برای انجام وظایف ربات است، استفاده می شوند. انواع مختلف حسگرها و کاربردهای آنها در رباتیک به شرح زیر است:
دوربین ها: دوربین ها برای گرفتن تصاویر و فیلم ها از محیط استفاده می شوند. این حسگرها برای شناسایی و تصویربرداری از اطراف و وظایف مختلف از جمله مسیریابی و شناسایی اشیاء استفاده می شوند.
سنسورهای الکترونیکی: این سنسورها شامل سنسورهای فشار، سنسورهای دما، سنسورهای رطوبت و سنسورهای گاز می شوند. این حسگرها به ربات اطلاعات مربوط به وضعیت محیط اطراف را ارائه می دهند.
شتاب سنج و ژیروسکوپ: این حسگرها برای اندازه گیری شتاب و سرعت چرخش ربات استفاده می شوند. آنها اطلاعات مهمی در مورد حرکت و جابه جایی ربات ارائه می دهند.
سنسورهای مسافت: این سنسورها برای اندازه گیری فاصله بین ربات و اشیاء یا محیط اطراف استفاده می شوند. از سنسورهای التراسونیک، لیزری و اینفرارد استفاده می شود.
سنسورهای لمسی: سنسورهای لمسی برای تشخیص لمس و فشار به کار می روند. این حسگرها در وظایفی مانند ایجاد تعامل با اشیاء یا محیط اطراف مورد استفاده قرار می گیرند.
گیرندهGPS: برای ربات هایی که نیاز به مکان یابی و ناوبری در فضا دارند، گیرنده GPS استفاده می شود. این حسگر اطلاعات مکانی را از سیگنال های ماهواره ها دریافت می کند.
حسگرها اطلاعات محیطی را به سیستم کنترل ربات منتقل کرده و این اطلاعات در فرآیند تصمیم گیری و اجرای وظایف مختلف ربات تاثیرگذار می باشند. استفاده از حسگرهای مناسب و ترکیب درست آنها، به ربات این امکان را می دهد که به درستی با محیط اطراف تعامل کند و وظایف خود را اجرا کند.
اهرم یا Actuator در رباتیک
اهرم (Actuator) در رباتیک، دستگاهی مکانیکی یا الکترومکانیکی است که به ربات این امکان را می دهد تا انرژی را دریافت کند و حرکت یا انجام وظایف مکانیکی را انجام دهد. اهرم ها عمدتاً وظیفه تبدیل انرژی الکتریکی، هیدرولیکی، یا هوایی به حرکت مکانیکی را دارند. این انرژی ممکن است از یک منبع انرژی خارجی مانند موتورها، پمپ ها، یا پنوماتیک ها تأمین شود.
برخی از نمونه های اهرم ها و کاربردهای آنها در رباتیک عبارتند از:
موتورها: موتورها به عنوان یکی از اهرم های اصلی در رباتیک عمل می کنند. آنها انرژی الکتریکی را به حرکت مکانیکی تبدیل می کنند و در انواع مختلف ربات ها برای جابه جایی، گشتاور، یا حتی تولید انرژی برای دیگر اهرم ها استفاده می شوند.
سرووموتورها: این نوع اهرم ها به عنوان موتورهای خاصی طراحی شده اند که دقت بالا در کنترل حرکت دارند. سرووموتورها معمولاً در وظایفی که نیاز به کنترل دقیق حرکت یا زاویه دارند، مورد استفاده قرار می گیرند.
سیلندرهای هیدرولیکی و پنوماتیک: این اهرم ها از انرژی هیدرولیک یا پنوماتیک برای ایجاد حرکت مکانیکی استفاده می کنند. سیلندرهای هیدرولیکی با استفاده از روغن هیدرولیک و سیلندرهای پنوماتیک با استفاده از هوا، به ربات امکان حرکت دقیق و قدرتمند را می دهند.
پمپ ها: در ربات هایی که از سیستم های هیدرولیکی استفاده می کنند، پمپ ها به عنوان اهرم اصلی جهت منتقل کردن روغن هیدرولیک برای ایجاد حرکت مکانیکی و کنترل فشار مورد استفاده قرار می گیرند.
اهرم ها با تأمین انرژی به ربات، نقش حیاتی در اجرای وظایف مختلف آن ایفا می کنند و به انعطاف پذیری و قابلیت تغییر شکل ربات کمک می کنند.
منبع تغذیه در رباتیک
منبع تغذیه در رباتیک، مکانیزمی است که انرژی مورد نیاز برای کارکرد ربات را فراهم می کند. این منبع تغذیه می تواند از انواع مختلف انرژی مانند باتری ها، سلول های خورشیدی، یا منابع انرژی خارجی دیگر باشد. در بسیاری از موارد، باتری ها به عنوان منبع اصلی تغذیه برای ربات ها استفاده می شوند.
نکات مهم درباره منابع تغذیه در رباتیک عبارتند از:
- باتری ها: باتری ها یا سلول های خورشیدی اغلب به عنوان منابع تغذیه اصلی در رباتیک استفاده می شوند. باتری ها می توانند به صورت شارژ شونده یا غیرقابل شارژ باشند و انرژی الکتریکی را فراهم می کنند.
- سلول های خورشیدی: در ربات هایی که نیاز به منبع تغذیه پایدار و بازتاب پذیر دارند، سلول های خورشیدی مورد استفاده قرار می گیرند. این سلول ها نور خورشید را به انرژی الکتریکی تبدیل می کنند.
- سیستم های هیدرولیکی یا پنوماتیکی: در برخی از ربات ها برای انجام وظایف سنگین یا نیاز به قدرت بیشتر، از سیستم های هیدرولیکی یا پنوماتیکی به عنوان منابع تغذیه استفاده می شود.
- انرژی از منابع خارجی: برخی از ربات ها برای تأمین انرژی از منابع خارجی مانند انرژی خورشیدی یا انرژی حرکتی محیط اطراف خود استفاده می کنند.
منبع تغذیه در رباتیک بسیار مهم است زیرا از کارکرد صحیح و بهینه ربات تأثیر مستقیم دارد. انتخاب مناسب برای منبع تغذیه به ویژگی ها و نیازهای خاص هر ربات بستگی دارد و این انتخاب باید با در نظر گرفتن نوع وظایف، نحوه حرکت، و مدت زمان کارکرد ربات صورت گیرد.
کنشگر انتهایی End Effector در رباتیک
کنشگر انتهایی یا “End Effector” در رباتیک بخشی از ربات است که به سرانجام یک دستور کنترلی می رسد و وظیفه اصلی آن اجرای وظایف مختلف در محیط است. کنشگر انتهایی، به صورت مستقیم با محیط اطراف تعامل دارد و برای انجام عملیات خاصی مثل گرفتن یک شی، جابجایی، یا اعمال فشار و یا گرما به کار می رود.
ویژگی ها و نکات مهم درباره کنشگر انتهایی در رباتیک عبارتند از:
ابزارهای مختلف: کنشگر انتهایی می تواند از انواع ابزارهای مختلف مانند دستگاه های گیرنده، دسته ها، ابزارهای برشی، یا حتی لیزرها برخوردار باشد. انتخاب ابزار مناسب بر اساس وظایف ربات بسیار حیاتی است.
حرکت: برخی از کنشگرها ثابت هستند و تنها توانایی چرخش در مکان خود را دارند، در حالی که دیگران قابلیت حرکت در فضا را دارند. این ویژگی مهم برای اجرای دقیق وظایف در محیط های مختلف است.
حسگرها: برخی از کنشگرها به حسگرهای مختلفی مثل سنسورهای لمسی، دما، یا تصویربرداری مجهز هستند تا اطلاعات لازم برای اجرای وظایف خود را جمع آوری کنند.
پروگرام پذیری: بسیاری از کنشگرها قابلیت برنامه ریزی و پروگرام پذیری را دارند، به این ترتیب که می توان تحت کنترل و برنامه ریزی از راه دور آن ها را کنترل کرد.
کنترل دقیق: کنشگرهای انتهایی باید دارای قابلیت کنترل دقیق باشند تا بتوانند وظایف مورد نظر را با دقت انجام دهند.
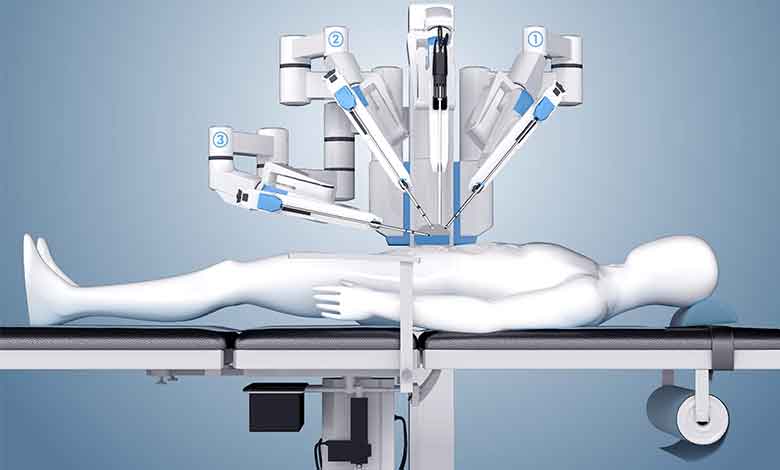
کنشگر انتهایی به عنوان یک ابزار مهم در رباتیک، نقش اساسی در انجام وظایف مختلف از جمله کارهای صنعتی، جراحی، گردشگری فضایی و غیره دارد. توانایی این کنشگرها در انجام وظایف متنوع و تطبیق با محیط، باعث تعدد و کاربرد گسترده آنها می شود.
جمع بندی و نتیجه گیری اجزای اصلی ربات ها
در این متن، به مقدمه ای در رباتیک و اجزای اصلی ربات ها پرداختیم. رباتیک به عنوان یک حوزه فناوری مبتنی بر هوش مصنوعی و مهندسی مکانیکی، نقش مهمی در زندگی امروزی ایفا می کند. اجزای اصلی ربات ها شامل سنسورها، سیستم کنترل، اعضای مکانیکی، و منبع تغذیه هستند.
سنسورها با جمع آوری اطلاعات از محیط، سیستم کنترل با پردازش اطلاعات و اتخاذ تصمیمات، اعضای مکانیکی با اجرای حرکات و وظایف مکانیکی، و منبع تغذیه با فراهم کردن انرژی برای عملکرد ربات، به همراه کنشگر انتهایی (End Effector) که مسئول اجرای وظایف نهایی در محیط است، به تشکیل یک سیستم کامل رباتیک می پردازند.
هر یک از اجزای اصلی ربات ها به ویژگی ها و وظایف خود متناسب با نیازهای وظایف مورد نظر ربات تعیین می شود. از ربات های صنعتی برای خطوط تولید، ربات های خدماتی برای ارائه خدمات در محیط های عمومی، ربات های اجتماعی برای تعامل با افراد، و ربات های حمل و نقل برای انجام وظایف حمل و نقل استفاده می شود.
در نهایت، رباتیک به عنوان یک حوزه پویا و پیشرفته، تأثیر گسترده ای در صنایع مختلف دارد و با توسعه و پیشرفت فناوری، استفاده از ربات ها در زندگی روزمره به دلیل افزایش بهره وری و بهبود شرایط زندگی افراد، به احتمال زیاد ادامه خواهد یافت.