در عصر فناوری امروز، رباتیک به عنوان یک حوزه کلیدی تکنولوژی پیشرفته، پیشرفتهای چشمگیری کرده است. یکی از ابزارهای بسیار مهم و اساسی برای توسعه و آزمون رباتها، نرمافزارهای شبیهساز ربات میباشند. این مقاله سعی دارد تا به بررسی اهمیت ، کاربرد و معرفی نرم افزار های شبیه ساز ربات بپردازد.
توسعه رباتها اغلب با وجود چالشهای مختلفی همراه است. یکی از مهمترین چالشها، هزینه و زمان مورد نیاز برای ساخت و تست رباتها در محیطهای واقعی است. در اینجا نرمافزارهای شبیهسازی وارد عمل میشوند. آنها این امکان را فراهم میکنند که رباتها و الگوریتمها به صورت مجازی شبیهسازی شوند، این امر زمان و هزینه را به شدت کاهش میدهد.
علم ربات چیست؟
علم رباتیک، به مطالعه و تحقیق در زمینه ساخت و کنترل رباتها میپردازد. این حوزه شامل طراحی، ساخت، عملکرد و کاربردهای رباتها در محیطهای مختلف است. در واقع، علم رباتیک تلاش دارد تا روشها، تکنولوژیها و مهارتهای مورد نیاز برای ایجاد رباتهایی که قادر به انجام وظایف مختلف و متنوع هستند، را بررسی و توسعه دهد. این زمینه شامل الگوریتمهای کنترل، هوش مصنوعی، ساخت مکانیکی، برنامهنویسی و تکنولوژیهای حسگری مختلف میشود.
اهمیت یادگیری علم ربات چیست؟
یادگیری علم رباتیک به ما امکان میدهد تا در فهم عمیقتری از فناوریهای آینده و راهکارهای نوآورانه برای مسائل پیچیده علمی و صنعتی پیشرفت کنیم. این امر اهمیتهای چندگانهای دارد:
- توسعه تکنولوژی: آشنایی با اصول رباتیک به ما کمک میکند تا تکنولوژیهای نوین را پیش بینی کرده و به توسعه و پیشرفت آنها کمک کنیم، از جمله رباتهای هوشمند و خودکار.
- استفاده در صنایع مختلف: آموزش در زمینه رباتیک به افراد این امکان را میدهد تا در صنایع مختلفی از پزشکی و مراقبتهای بهداشتی تا صنایع خودروسازی و ساختمانی، از این تکنولوژی بهره ببرند.
- حل مسائل پیچیده: رباتیک در حل مسائل پیچیده و چالشبرانگیز مانند مسائل محیطی، علوم درمانی و حتی کاهش پسماندها نقش بسیار موثری دارد.
- توسعه مهارتهای کاری: یادگیری رباتیک به دانشجویان و فارغالتحصیلان کمک میکند تا مهارتهای کاری ارزشمندی را تقویت کنند که در صنایع فناوری اطلاعات و مهندسی بسیار مورد نیاز است.
- آمادگی برای آینده: این علم ما را برای جهانی که رباتها و هوش مصنوعی در آن نقش محوری دارند، آماده میکند.
از آنجا که رباتیک از ترکیب چندین حوزه علمی استفاده میکند، یادگیری آن میتواند به فهم بهتر ارتباطات بین حوزههای مختلف و حل مسائل چند رشتهای کمک کند.
نرم افزار های شبیه ساز ربات
نرم افزار های شبیه سازی ربات، ابزارهایی هستند که به توسعه دهندگان و مهندسان اجازه میدهند تا رفتار و عملکرد رباتها را در محیطهای مجازی شبیهسازی کنند. این نرمافزارها به آنها امکان میدهند تا رباتها و الگوریتمهای کنترلی را تست و بهینهسازی کنند بدون اینکه نیاز به استفاده از رباتهای واقعی و محیطهای فیزیکی داشته باشند.
نرم افزار شبیه ساز ربات Gazebo

Gazebo یک شبیهساز رایگان و منبعباز برای رباتیک و کنترل موقعیتی و ردیابی است. این نرمافزار ابزاری قدرتمند برای شبیهسازی رباتها و محیطهای آنها فراهم میکند. از این شبیهساز به عنوان یک ابزار توسعه و آزمون برای رباتها استفاده میشود.
ویژگیهای Gazebo شامل موارد زیر میشود:
- محیط سهبعدی: Gazebo به کاربران اجازه میدهد تا محیطهای سهبعدی با تمامی جزئیات را شبیهسازی کنند. این امکان را فراهم میکند تا رفتار و عملکرد رباتها در محیطهای واقعی را با دقت بسیار بالا شبیهسازی کند.
- پشتیبانی از انواع رباتها: Gazebo از انواع مختلف رباتها و ماژولهای آنها حمایت میکند، از رباتهای پرنده گرفته تا رباتهای دوپا.
- پلاگینهای گسترده: این شبیهساز امکان استفاده از پلاگینهای مختلف را فراهم میکند که به کاربران این امکان را میدهد تا قابلیتهای اضافی را به Gazebo اضافه کنند.
- محیط کاربری قدرتمند: Gazebo دارای یک محیط کاربری کارآمد و قدرتمند است که به کاربران امکان انجام تنظیمات و تغییرات مختلف را فراهم میکند.
از Gazebo برای توسعه، تست و آموزش الگوریتمهای کنترلی و رباتیک استفاده میشود و به دلیل ویژگیهای قوی و پشتیبانی گستردهاش، یکی از ابزارهای محبوب در زمینه رباتیک محسوب میشود.
نرم افزار شبیه ساز ربات Webots
Webots یک شبیهساز قدرتمند و گسترده برای رباتیک است. این نرمافزار به توسعهدهندگان و مهندسان اجازه میدهد تا رباتها، سیستمهای کنترلی و محیطهای مختلف را شبیهسازی کرده و تست کنند.
ویژگیهای کلیدی Webots عبارتند از:
- محیط چندمنظوره: این شبیهساز اجازه میدهد تا محیطهای سه بعدی مختلف و واقعگرایانه را ایجاد کرده و رباتها را در این محیطها شبیهسازی کند.
- پشتیبانی از انواع رباتها: Webots از انواع مختلف رباتها و پلتفرمهای آنها حمایت میکند، از رباتهای چهارپا تا پرندههای رباتیک.
- زبانهای برنامهنویسی متعدد: این شبیهساز از زبانهای برنامهنویسی چندگانه از جمله C/C++، Python و MATLAB پشتیبانی میکند که به کاربران این امکان را میدهد تا به زبانی که ترجیح میدهند، برنامه نویسی کنند.
- پشتیبانی از ویژگیهای حسگری: Webots از مجموعهای از حسگرها و عناصر سختافزاری برای شبیهسازی محیطها و تعامل رباتها با محیط استفاده میکند.
این شبیهساز ابزاری کارآمد برای توسعه، تست و آموزش الگوریتمهای کنترلی و رباتیک است و به دلیل امکانات گسترده و پشتیبانی از زبانهای برنامهنویسی متنوع، جزو ابزارهای محبوب در حوزه رباتیک محسوب میشود.
نرم افزار شبیه ساز ربات V-REP

V-REP یک شبیهساز قدرتمند در حوزه رباتیک و کنترل است. این نرمافزار به توسعهدهندگان اجازه میدهد تا رباتها، سنسورها، فعالیتهای مکانیکی و کنترلی را در یک محیط شبیهسازی کنند.
مهمترین ویژگیهای V-REP شامل:
- محیط چند منظوره: V-REP این امکان را فراهم میکند تا کاربران بتوانند محیطهای سه بعدی مختلف و پیچیده را برای شبیهسازی رباتها ایجاد کنند.
- پشتیبانی از انواع مختلف رباتها: این شبیهساز از انواع مختلف رباتها، از رباتهای چهارپایه گرفته تا دستآوردهای پیشرفتهتر، حمایت میکند.
- پشتیبانی از زبانهای برنامهنویسی مختلف: V-REP از زبانهای برنامهنویسی چون C/C++, Python و Lua پشتیبانی میکند که این امکان را به کاربران میدهد تا به زبان مورد نظرشان، مدلها و عملکردهای مورد نیاز را پیادهسازی کنند.
- محیط کاربری کارآمد: V-REP دارای یک محیط کاربری کارآمد و آسان برای استفاده است که به کاربران کمک میکند تا مدلهای خود را بهراحتی ایجاد کرده و تنظیمات مختلف را اعمال کنند.
V-REP یکی از شبیهسازهای محبوب در حوزه رباتیک است که به دلیل ویژگیهای گسترده و ابزارهای کاربردی برای توسعه، آموزش و تست رباتها استفاده میشود.
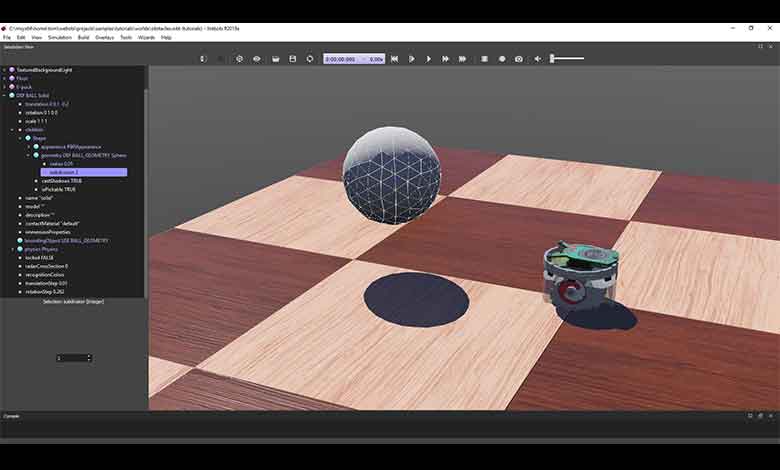
نرم افزار شبیه ساز ربات ROS
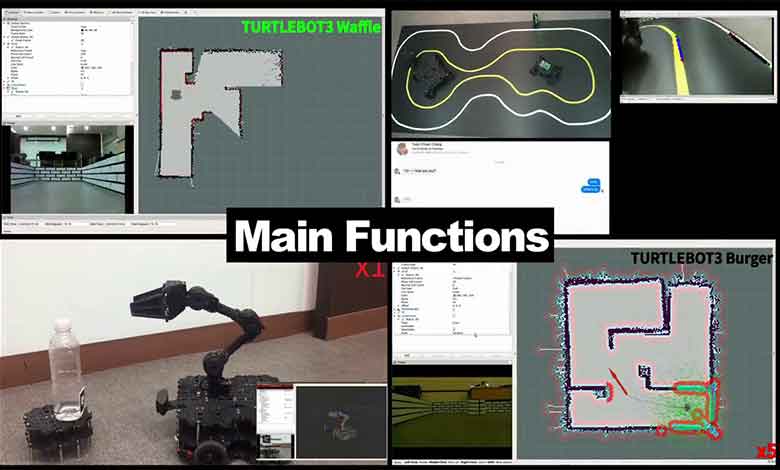
ROS یا Robot Operating System، یک سیستم عامل منبعباز برای رباتیک است که شامل مجموعهای از ابزارها، کتابخانهها و روشهای استاندارد برای توسعه رباتها میشود. این نرمافزار به توسعهدهندگان امکان میدهد تا رباتها را کنترل کرده و آنها را با استفاده از محیطهای شبیهسازی مختلف آزمایش کنند.
ویژگیهای مهم ROS شامل:
- ساختار منعطف: ROS دارای ساختاری منعطف است که به توسعهدهندگان این امکان را میدهد تا برنامههای خود را به صورت ماژولار طراحی کرده و از قطعات مختلف استفاده کنند.
- کتابخانههای گسترده: ROS دارای مجموعهای از کتابخانهها و ابزارهای گسترده است که به توسعهدهندگان امکان میدهد الگوریتمهای مختلف را پیادهسازی کنند و با سختافزارهای مختلف ارتباط برقرار کنند.
- پشتیبانی از محیطهای شبیهسازی: ROS از محیطهای شبیهسازی مختلف مانند Gazebo حمایت میکند که این امکان را به توسعهدهندگان میدهد تا رباتها را در محیطهای مجازی تست کنند.
- پشتیبانی از زبانهای برنامهنویسی متنوع: ROS از زبانهای برنامهنویسی متنوعی چون C++, Python و MATLAB حمایت میکند که این امکان را به توسعهدهندگان میدهد تا به زبانی که ترجیح میدهند، برنامه نویسی کنند.
ROS به دلیل ویژگیهایش، از جمله ساختار ماژولار و پشتیبانی از زبانهای مختلف، یکی از نرمافزارهای بسیار محبوب در حوزه رباتیک است و در توسعه و آموزش رباتها و سیستمهای هوشمند مورد استفاده قرار میگیرد.
نرم افزار شبیه ساز ربات آردوینو
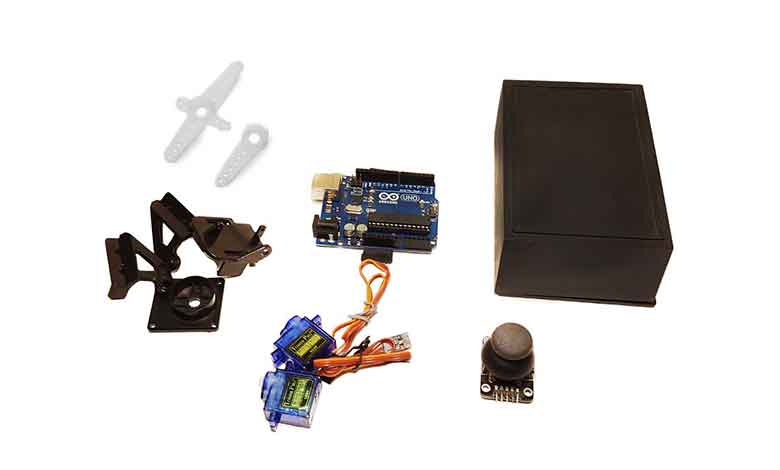
Arduino IDE، محیط توسعه یکپارچه (IDE) برای برنامهنویسی و بارگذاری کدها بر روی بردهای Arduino است. این نرمافزار ابزار اصلی برای برنامهنویسی میکروکنترلرهای Arduino و اجرای کدها بر روی آنهاست.
ویژگیهای Arduino IDE شامل:
- پشتیبانی از زبان برنامهنویسی C/C++: این نرمافزار از زبانهای برنامهنویسی C/C++ برای توسعه کدها و برنامههای Arduino استفاده میکند.
- کتابخانههای Arduino: Arduino IDE دارای مجموعهای از کتابخانهها است که به برنامهنویسان امکان میدهد تا از توابع و روشهای آماده برای اجزای مختلف استفاده کنند.
- محیط گرافیکی ساده: این IDE دارای محیط سادهای است که به کاربران کمک میکند تا کدهای خود را بنویسند، آنها را تست کنند و بر روی بردهای Arduino خود بارگذاری کنند.
- پشتیبانی از انواع مختلف بردها: Arduino IDE از انواع مختلف بردهای Arduino از جمله Uno، Mega، Nano و بسیاری دیگر پشتیبانی میکند.
Arduino IDE یک ابزار کاربردی برای برنامهنویسی و توسعه برای بردهای Arduino است. این ابزار به برنامهنویسان امکان میدهد که به سرعت کدهای خود را بنویسند و آنها را بر روی بردهای Arduino اجرا کنند و کنترل کنند.
این نرمافزارها به توسعه دهندگان امکان میدهند تا روی رباتها و الگوریتمهای کنترلی خود کار کنند، خطاها را تشخیص دهند و آنها را بهبود بخشند بدون نیاز به استفاده از تجهیزات و محیطهای فیزیکی واقعی.
جمع بندی و نتیجه گیری
نرمافزارهای شبیهساز ربات به توسعهدهندگان و مهندسان امکان میدهند تا رباتها و الگوریتمهای خود را در یک محیط ایمن و کنترل شده تست کنند. این ابزارها برای توسعه رباتیک و ارتقاء تکنولوژیهای مرتبط بسیار حیاتی هستند و نقش بسیار مهمی در پیشرفت این حوزه دارند.