مدلسازی سینماتیک در رباتیک به معنای تعریف رابطههای ریاضی بین اجزای مکانیکی یک ربات است. این اجزا میتوانند شامل اجزای مختلف مانند ارتباط بین مفاصل، طول و جهت اجزا و… باشند. از مدلسازی سینماتیک در رباتیک برای تعیین حرکت و موقعیت اجزا در فضا استفاده میشود.
در مدلسازی سینماتیک ربات، دو نوع رویکرد معمول وجود دارد: سینماتیک موقعیتی و سینماتیک سرعتی. سینماتیک موقعیتی، حرکتها و موقعیتهای اجزا را بدون توجه به سرعت یا نیرو مورد بررسی قرار میدهد. اما سینماتیک سرعتی، در عین حفظ اطلاعات موقعیت، به بررسی سرعتها و شتابهای مختلف در اجزا میپردازد.
برای مدلسازی سینماتیک، از مفاصل و ارتباطات بین قطعات استفاده میشود. با توجه به نوع ربات و ساختار آن، از روشهای مختلفی برای مدلسازی استفاده میشود، از جمله روشهای دوفری، ترسیمی و روشهای مبتنی بر ماتریس.
این مدلسازی کمک میکند تا رباتها را برنامهریزی کرد و حرکات دقیق و مورد نیاز برای انجام وظایف مشخص را ایجاد کنیم.
سینماتیک در رباتیک چیست؟
سینماتیک در رباتیک علمی است که به بررسی حرکت و موقعیت اجزای رباتها میپردازد. این حوزه از ریاضیات و فیزیک، با استفاده از مدلسازی ریاضی، نحوه جابجایی، سرعت و شتاب اجزا را توصیف میکند. سینماتیک موقعیتی به ما کمک میکند تا بدون در نظر گرفتن نیروها و نیروهای خارجی، موقعیت و حرکت اجزا را مدلسازی کنیم. این مفهوم اساسی در طراحی و کنترل رباتها به کار میرود، زیرا اجازای ربات باید به دقت واکنش دهند و اهداف مورد نظر را انجام دهند.

سینماتیک مستقیم و معکوس در رباتیک
سینماتیک در رباتیک یکی از اصولیترین مفاهیم است که برای تحلیل و کنترل حرکت رباتها از آن استفاده میشود. دو نوع اساسی سینماتیک، سینماتیک مستقیم و سینماتیک معکوس هستند که هرکدام وظایف و نقشهای مختلفی در فهم و کنترل حرکت رباتها دارند.
سینماتیک مستقیم:
در سینماتیک مستقیم، تلاش برای تعیین حرکت و موقعیت اجزا بر اساس پارامترهای ورودی انجام میشود. این پارامترها معمولاً شامل زوایا و ابعاد مکانیکی مانند طول اعضا و اتصالات میشوند. با استفاده از این اطلاعات، میتوان حرکت و موقعیت اجزا را به صورت ریاضی و دقیق مدل کرد. سینماتیک مستقیم اساسی است برای برنامهریزی حرکت رباتها و انجام وظایف مشخص.
سینماتیک معکوس:
به طور مقابل، سینماتیک معکوس به معنای تعیین ورودیهای مورد نیاز برای رسیدن به حرکت یا موقعیت مشخص است. با داشتن حرکت یا موقعیت مورد نظر، این نوع از سینماتیک امکان محاسبه و یافتن ورودیهای لازم برای دستیابی به آن را فراهم میکند. این امر بسیار مهم است زیرا در کنترل رباتها و ماشینها، ممکن است بخواهیم به طور مستقیم یک موقعیت یا حرکت خاص را بدست آوریم و نیاز داریم تا ورودیهای مورد نیاز برای رسیدن به آن را محاسبه کنیم.
کاربردها و اهمیت سینماتیک
سینماتیک در رباتیک و دیگر حوزههای مهندسی اهمیت زیادی دارد و کاربردهای گستردهای دارد:
- طراحی و کنترل رباتیک: سینماتیک به مهندسان امکان میدهد تا حرکات رباتها را بررسی و طراحی کنند. با دانستن سینماتیک، میتوانند حرکات دقیق را برنامهریزی کرده و رباتها را به طور دقیق کنترل کنند.
- صنایع صنعتی: در خطوط تولید، سینماتیک به طور گسترده برای طراحی و کنترل دستگاههای خودکار و رباتها استفاده میشود. این کاربرد به بهبود بهرهوری و دقت در فرایندهای تولید کمک میکند.
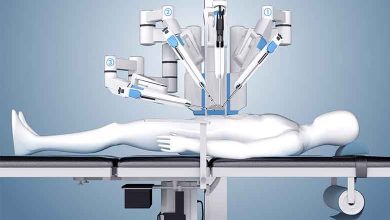
- پزشکی و جراحی روباتیک: در جراحیهای روباتیک، دانش سینماتیک به پزشکان کمک میکند تا روباتها را به طور دقیق کنترل کرده و به بخشهای مورد نظر در بدن بیمار دسترسی دهند.
- هوافضا و رباتیک فضایی: در ماموریتهای فضایی، اهمیت سینماتیک بسیار زیاد است. مهندسان میتوانند با استفاده از این دانش، حرکت رباتها و سیستمهای خودکار را برنامهریزی کنند.
- اتوماسیون صنعتی: در صنایع مختلف مانند خودروسازی، الکترونیک، و صنایع پردازشی، سینماتیک برای اتوماسیون فرایندها و کنترل دستگاههای هوشمند استفاده میشود.
- طراحی و شبیهسازی: سینماتیک در شبیهسازیها برای پیشبینی حرکت و عملکرد اجزای مختلف در طراحی از قبیل خودروها، ماشینآلات و سیستمهای پیچیده استفاده میشود.
به طور کلی، سینماتیک اهمیت زیادی در طراحی، کنترل و بهبود عملکرد سیستمهای مکانیکی و رباتیک دارد و به دانشمندان و مهندسان امکان میدهد تا به طور دقیق حرکات را مدل کنند و بهبودهای موثری را در صنایع و فناوریهای مختلف به ارمغان بیاورند.
زوایای اویلر و ماتریسهای دوران
سینماتیک مستقیم و معکوس هر دو نقش مهمی در مهندسی رباتیک دارند. توانایی درک دقیق از حرکات و موقعیتها، همراه با توانایی تعیین و کنترل ورودیهای مورد نیاز برای رسیدن به آنها، برای طراحی و کنترل صحیح رباتها و دستگاههای خودکار بسیار حیاتی است.
زوایای اویلر و ماتریسهای دوران دو روش متداول برای توصیف و گسترش مفهوم دوران در فضای سهبعدی هستند.

زوایای اویلر
زوایای اویلر یک روش برای توصیف حرکتها و دورانها در فضای سه بعدی است. این سیستم از سه زاویه مختلف برای تعیین دوران استفاده میکند، معمولاً شامل زاویه یازدهی (Roll)، زاویه پیچ (Pitch) و زاویه برگشت (Yaw) میشود.
زاویه یازدهی (Roll): این زاویه یک دوران در اطراف محور X است. به عبارت دیگر، این دوران حول محوری است که عمود بر صفحهٔ اولیه مختصات X-Y قرار دارد.
زاویه پیچ (Pitch): این زاویه یک دوران در اطراف محور Y است. این دوران به عملیاتی مشابه با چرخش یک هواپیما به سرما یا به گرما شبیه است.
زاویه برگشت (Yaw): این زاویه یک دوران در اطراف محور Z است. این دوران مانند چرخش یک گرداب یا یک چرخش حول محور اصلی بر روی زمین است.
از اویلر برای توصیف دقیق دورانها و حرکتها استفاده میشود. این سه زاویه اجازه میدهد تا هر دوران در فضای سه بعدی به صورت دقیق توصیف شود. از این دستگاه معمولاً در هوافضا، رباتیک، هواپیماها، کشتیها و بسیاری از سیستمهای فضایی استفاده میشود تا دورانها و حرکتها را دقیقاً توصیف کند.
ماتریسهای دوران
ماتریس دوران، یک ابزار قدرتمند در هندسه و ریاضیات فضای سه بعدی است. این ماتریسها به صورت ماتریسهای 3×3 است که برای توصیف دقیق دورانها و حرکتهایی که اجسام در فضای سه بعدی انجام میدهند، استفاده میشود.
ماتریس دوران به صورت زیر نمایش داده میشود:
عناصر مختلف ماتریس هستند. این ماتریس به عنوان یک واحد دورانی برای اشیاء در فضای سه بعدی عمل میکند. معمولاً این ماتریسها با استفاده از توابع محاسباتی و فرمولهای هندسی ساخته میشوند.
یکی از مزیتهای اصلی استفاده از ماتریسهای دوران، این است که میتوان از آنها برای ترکیب چندین دوران، یا پیرواندازی انتزاعی از حرکتهای مختلف استفاده کرد. این ماتریسها معمولاً در مطالعات رباتیک، گرافیک کامپیوتری، سیستمهای هوافضا و دیگر حوزههای مهندسی استفاده میشوند.
ماتریس دوران معمولاً با توجه به نوع دوران، مثلاً دورانهای اولیه یا دورانهای نسبی به اکس، وای و زد، محاسبه میشود و به عنوان یک ابزار محاسباتی بسیار کارآمد برای توصیف و کنترل حرکات فضایی مورد استفاده قرار میگیرد.
هر دو روش از نظر ریاضیاتی برای نمایش و توصیف دورانها در فضای سهبعدی مورد استفاده قرار میگیرند. انتخاب بین زوایای اویلر و ماتریسهای دوران معمولاً بسته به کاربردهای خاص و نیازهای محاسباتی و عملی است. هر کدام از این روشها ویژگیها و محدودیتهای خود را دارند که در موارد مختلف برای محاسبات و برنامهریزی مورد استفاده قرار میگیرند.
قاعده دناویت-هارتنبرگ
قاعده دناویت-هارتنبرگ، یک اصل مهم در فیزیک کوانتومی است که درباره حالتهای پایه یا وضعیتهای پایه یک سیستم فیزیکی با انرژیهای مختلف حرف میزند. این قاعده اصلی میگوید که در یک سیستم کوانتومی یک نفرات (یا هستههای اصلی) نمیتوانند در یک حالت پایه یا وضعیت پایه با انرژیهای مختلف باشند. به عبارت دیگر، اگر یک سیستم چند نفراته باشد، نمیتوان همه آنها در وضعیتهای پایه با انرژیهای مختلف قرار داد.
این قاعده به عنوان یک محدودیت برای مقداردهی به حالتهای پایه یا وضعیتهای انرژیای مختلف به نفرات یا هستههای اصلی یک سیستم فیزیکی کوانتومی در فیزیک هستهای و فیزیک اتمی بسیار مهم است. این قاعده در ارتباط با ساختار الکترونی هستهها و نفرات یک جامد، مولکول یا سیستمهای دیگر استفاده میشود.
قاعده دناویت-هارتنبرگ بهطور خاص به توضیح و محدودیتهایی که درباره توضیحات کوانتومی سیستمهای چند نفراته با انرژیهای مختلف اعمال میشود، مربوط است. این قاعده به عنوان یکی از اصول اساسی در مطالعه ساختارهای الکترونی و وضعیتهای انرژی مربوط به اتمها و مولکولها مورد استفاده قرار میگیرد.
سیستمهای دیجیتال و آنالوگ در طراحی رباتها
در طراحی رباتها، استفاده از سیستمهای دیجیتال و آنالوگ بستگی به نوع وظیفه و محیط کاری ربات دارد.
سیستمهای دیجیتال:
⦁ کنترل و محاسبات دقیق: سیستمهای دیجیتال برای کنترل دقیق و محاسبات پیچیده مورد استفاده قرار میگیرند. از پردازندهها، میکروکنترلرها و سیستمهای کامپیوتری استفاده میشود تا حرکات دقیق و گستردهتری را کنترل کنند.
⦁ قابلیت برنامهریزی و انعطاف پذیری: سیستمهای دیجیتال اجازه میدهند برنامهریزی و کنترل بر اساس الگوریتمهای پیچیده و قابل تغییر را فراهم کنند.
سیستمهای آنالوگ:
⦁ حسگرها و سیگنالهای فیزیکی: سیستمهای آنالوگ، برای دریافت دادههای فیزیکی مانند سنسورها و حسگرها (مثلاً دادههای حرارتی، لرزش، فشار و غیره) استفاده میشوند.
⦁ پردازش سیگنالهای آنالوگ: برای پردازش سیگنالهای ورودی فیزیکی از حسگرها، سیستمهای آنالوگ مورد استفاده قرار میگیرند.
ترکیب استفاده از هر دو نوع:
در طراحی رباتها، اغلب از ترکیب سیستمهای دیجیتال و آنالوگ بهره میبرند. به عنوان مثال، استفاده از حسگرهای آنالوگ برای دریافت دادههای فیزیکی و سپس انتقال این دادهها به سیستمهای دیجیتال برای پردازش و کنترل حرکتها و وظایف مختلف ربات.
مزایا و محدودیتها:
⦁ مزیت سیستمهای دیجیتال: دقت بالا و امکان برنامهریزی دقیق.
⦁ مزیت سیستمهای آنالوگ: دریافت دادههای فیزیکی و پردازش سیگنالهای آنالوگ بدون نیاز به تبدیل دیجیتال به آنالوگ.
استفاده از هر نوع سیستم بستگی به نوع و وظیفه خاص ربات دارد. بسیاری از رباتها از ترکیب هر دو نوع برای بهرهوری بیشتر و انجام وظایف متنوع استفاده میکنند.
جمع بندی و نتیجه گیری
در این مقاله، به مفاهیم مهمی در زمینه سینماتیک و دوران در رباتیک پرداختیم. ابتدا به تعریف و توضیح مفاهیم سینماتیک مستقیم و معکوس پرداختیم. سینماتیک مستقیم به ما امکان میدهد تا حرکت و موقعیت اجزا را براساس ورودیهای مشخص مدل کنیم، در حالی که سینماتیک معکوس به ما امکان میدهد تا با داشتن حرکت یا موقعیت مورد نظر، ورودیهای لازم برای رسیدن به آن را تعیین کنیم.
سپس به توضیح زوایای اویلر و ماتریسهای دوران پرداختیم. زوایای اویلر به ما امکان میدهند تا دورانها را در فضای سه بعدی به صورت دقیق و مفهومی توصیف کنیم. ماتریسهای دوران ابزار قدرتمندی هستند که برای توصیف دقیق دورانها و حرکتها در فضای سه بعدی استفاده میشوند.
در نهایت، به اهمیت سینماتیک و کاربردهای آن در رباتیک اشاره کردیم. سینماتیک در طراحی و کنترل رباتها بسیار حیاتی است و از تحقیقات و توسعه در حوزههای مختلفی از جمله صنعت، پزشکی، هوافضا، و معماری بهره میبرد.
در کل، مفاهیم ارائه شده در این مقاله برای درک بهتر حرکات و دورانها در رباتیک و دیگر حوزههای مرتبط بسیار مفید هستند و ابزارهای قدرتمندی را برای مدلسازی و کنترل رباتها فراهم میکنند.